轨迹跟踪仿真
轨迹跟踪仿真
课程内容
共8个章节 8个实验
1 实验1:小车模型设计与世界构建
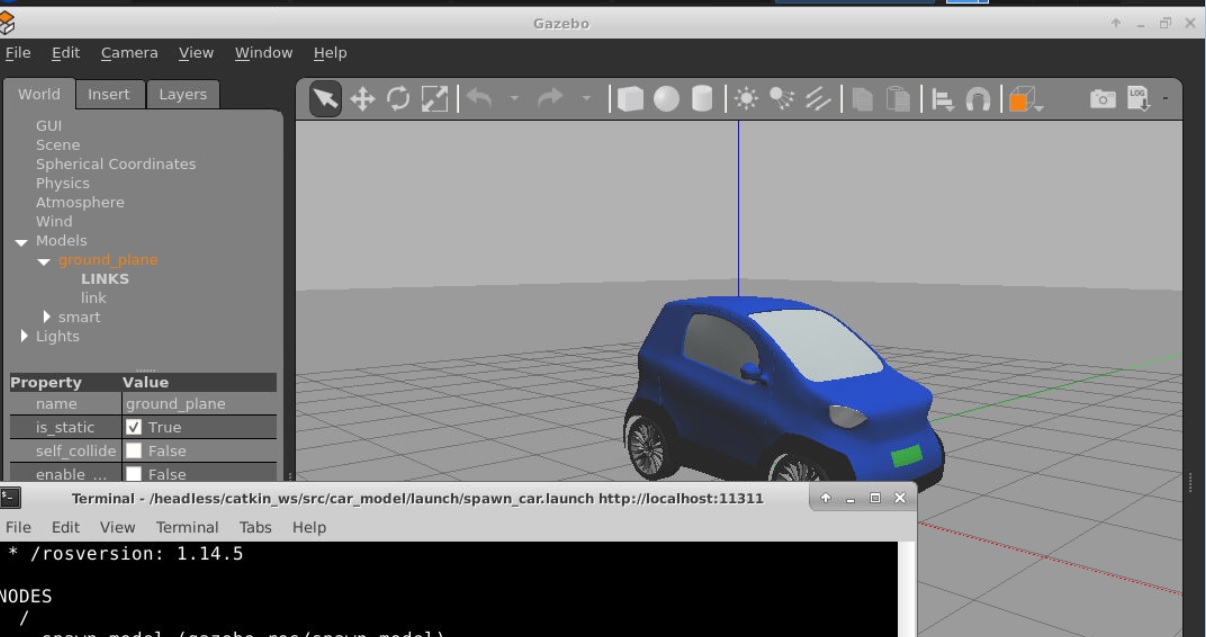
小车模型设计与世界构建
实验1 实验1:小车模型设计与世界构建
文件在桌面的example file文件夹中的09文件夹内。
2 实验2:基于ROS Topic的车轮控制
基于ROS Topic的车轮控制
实验1 实验2:基于ROS Topic的车轮控制
替换文件在桌面的example file文件夹中的10文件夹内。
3 实验3:控制小车速度与转向
控制小车速度与转向
实验1 实验3:控制小车速度与转向
替换文件在桌面的example file文件夹中的11文件夹内。
4 实验4:获取小车定位与速度
获取小车定位与速度
实验1 实验4:获取小车定位与速度
替换文件在桌面的example file文件夹中的12文件夹内。
5 实验5:RViz可视化
RViz可视化
实验1 实验5:RViz可视化
替换文件在桌面的example file文件夹中的13文件夹内。
6 实验6:轨迹跟踪 - Global Path
轨迹跟踪 - Global Path
实验1 实验6:轨迹跟踪 - Global Path
替换文件在桌面的example file文件夹中的14文件夹内。
7 实验7:轨迹跟踪 - Local Path
轨迹跟踪 - Local Path
实验1 实验7:轨迹跟踪 - Local Path
替换文件在桌面的example file文件夹中的15文件夹内。
8 实验8:轨迹跟踪 - Pure Pursuit
轨迹跟踪 - Pure Pursuit
实验1 实验8:轨迹跟踪 - Pure Pursuit
替换文件在桌面的example file文件夹中的16文件夹内。