ROS2智能移动机器人
ROS2智能移动机器人
课程内容
共3个章节 3个实验
1 第1章 ROS2设置
ROS2设置
实验1 实验1:ROS2移动机器人设置
在ROS-dashing环境下的实验配置
2 第2章 ROS2模拟
ROS2模拟
实验1 实验2:ROS2移动机器人仿真
TurtleBot3支持可以在仿真中使用虚拟机器人进行编程和开发的开发环境,有两种开发环境:Fake Node和Gazebo。
假节点:可以使用Fake Node和3D可视化工具RViz。用于测试TurtleBot3的模型和机器人的运动。它不支持使用传感器数据,因此不支持SLAM和导航。
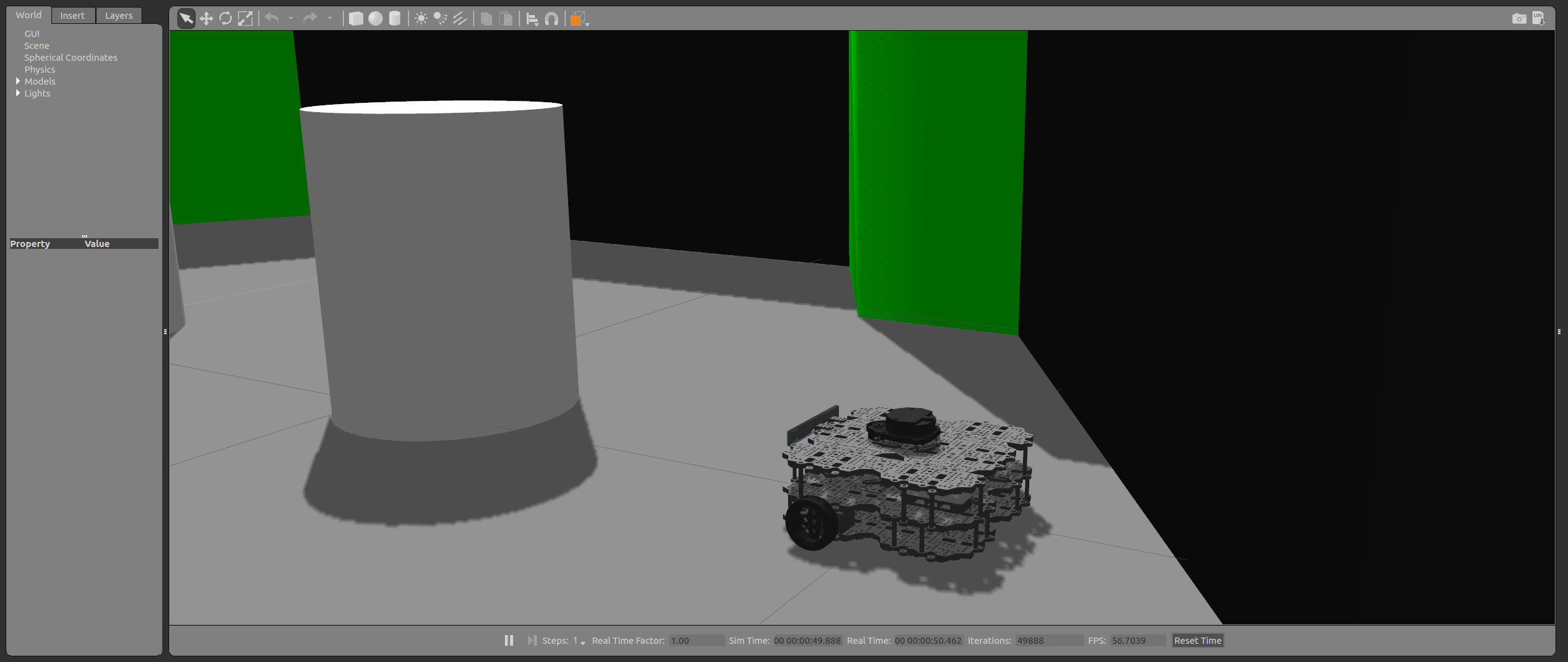
Gazebo:Gazebo允许Turtlebot3在模拟器中使用虚拟传感器数据:IMU,LDS和摄像机信息。使用Gazabo模拟带有SLAM或导航的TurtleBot3 。
假节点:可以使用Fake Node和3D可视化工具RViz。用于测试TurtleBot3的模型和机器人的运动。它不支持使用传感器数据,因此不支持SLAM和导航。
Gazebo:Gazebo允许Turtlebot3在模拟器中使用虚拟传感器数据:IMU,LDS和摄像机信息。使用Gazabo模拟带有SLAM或导航的TurtleBot3 。
3 第3章 ROS2机器学习
ROS2机器学习
实验1 实验3:ROS2移动机器人动态避障(基于强化学习)
机器学习是一种数据分析技术,它教会计算机识别自然的人类和动物——通过经验学习。机器学习有三种类型:监督学习、非监督学习、强化学习。
此应用程序通过DQN(Deep Q-Learning)进行强化学习。强化学习关注的是软件代理如何在环境中采取行动,从而最大化累计奖励的概念。
此应用程序通过DQN(Deep Q-Learning)进行强化学习。强化学习关注的是软件代理如何在环境中采取行动,从而最大化累计奖励的概念。